PhysSplat: Efficient Physics Simulation for 3D Scenes via MLLM-Guided Gaussian Splatting
Abstract
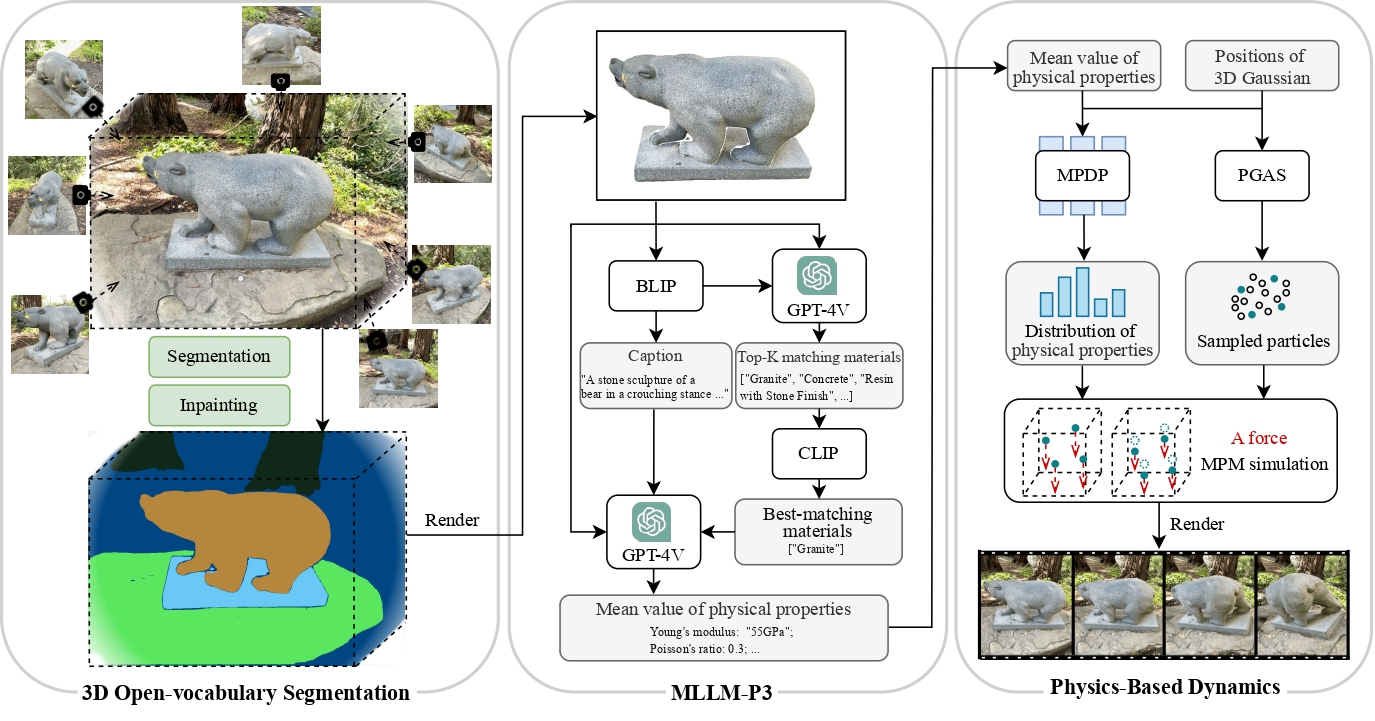
Recent advancements in 3D generation models have opened new possibilities for simulating dynamic 3D object movements and customizing behaviors, yet creating this content remains challenging. Current methods often require manual assignment of precise physical properties for simulations or rely on video generation models to predict them, which is computationally intensive. In this paper, we rethink the usage of multi-modal large language model (MLLM) in physics-based simulation, and present Sim Anything, a physics-based approach that endows static 3D objects with interactive dynamics. We begin with detailed scene reconstruction and object-level 3D open-vocabulary segmentation, progressing to multi-view image in-painting. Inspired by human visual reasoning, we propose MLLM-based Physical Property Perception (MLLM-P3) to predict mean physical properties of objects in a zero-shot manner. Based on the mean values and the object's geometry, the Material Property Distribution Prediction model (MPDP) model then estimates the full distribution, reformulating the problem as probability distribution estimation to reduce computational costs. Finally, we simulate objects in an open-world scene with particles sampled via the Physical-Geometric Adaptive Sampling (PGAS) strategy, efficiently capturing complex deformations and significantly reducing computational costs.Extensive experiments and user studies demonstrate our Sim Anything achieves more realistic motion than state-of-the-art methods within 2 minutes on a single GPU.
Visual Results
Comparison with baselines and real captured videos on PhysDreamer
Visual comparison between our synthesized videos and SOTA methods (PhysGaussian, DreamGaussian4D, and PhysDreamer). We show that our method generates the most realistic scene movement. Additionally, these videos are the same ones utilized in our user study. Details about the user study is mentioned in the experiment section of the paper.
BibTeX
@article{zhao2024efficient,
title={Efficient Physics Simulation for 3D Scenes via MLLM-Guided Gaussian Splatting},
author={Zhao, Haoyu and Wang, Hao and Zhao, Xingyue and Fei, Hao and Wang, Hongqiu and Long, Chengjiang and Zou, Hua},
journal={arXiv preprint arXiv:2411.12789},
year={2024}
}